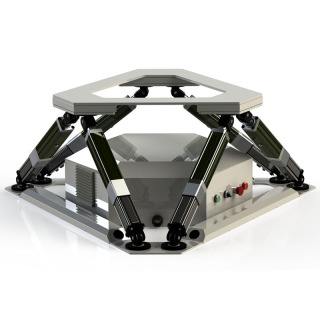
Cơ sở chuyển động mô phỏng lái xe ô tô
Các cơ sở chuyển động được sử dụng rộng rãi trong các mô phỏng đào tạo khác nhau, chẳng hạn như mô phỏng chuyến bay, mô phỏng tàu, nền tảng mô phỏng cất cánh và hạ cánh trực thăng hải quân, mô phỏng xe tăng, mô phỏng lái xe ô tô, mô phỏng lái xe lửa, mô phỏng động đất, phim động, thiết bị giải trí và các lĩnh vực khác , và ngay cả trong việc cập bến tàu vũ trụ và tiếp nhiên liệu cho tàu chở dầu; Thiết bị giải trí văn hóa, thiết bị trải nghiệm giải trí tương tác mới, mô phỏng kỹ thuật, đánh giá thiết kế, thử nghiệm, thử nghiệm, đào tạo nhiệm vụ, đánh giá đào tạo, mô phỏng môi trường, tái diễn sự kiện, v.v.
Thông số kỹ thuật chính:
Hiệu suất hệ thống
Tư thế Đơn vị biên độ vận tốc nâng cao mm ±160 375mm/giây Dâng trào mm ±160 375mm/giây lắc lư mm ±160 375mm/giây Sân bóng đá ° ±16 15°/S Cuộn ° ±16 15°/S ngáp ° ±16 15°/S
thông số kỹ thuật tải trọng
| Trọng lượng sản phẩm | 349kg |
| Khối hàng | 1000 kg |
Kích thước sản phẩm
| Chiều dài | 2000 mm |
| Chiều rộng | 1515mm |
| Chiều cao tối thiểu | 780 mm |
Yêu cầu về năng lượng
| Nguồn cấp | 380V ba pha |
| Sự liên quan | Ethernet |
Hệ thống điều khiển (Tủ điện)

Hệ thống điều khiển: phần mềm điều khiển nhúng chạy trên bộ điều khiển chính và bộ điều khiển chuyển động sử dụng bộ điều khiển chuyển động xe buýt hiệu suất cao Gugao và sử dụng thuật toán động học thuận và ngược do công ty chúng tôi phát triển độc lập để thực hiện điều khiển chuyển động của sáu độ nền tảng chuyển động -of-freedom.
Phần mềm điều khiển bao gồm nhưng không giới hạn các mô-đun chức năng sau: mô-đun chức năng tự kiểm tra hệ thống, mô-đun chức năng kết nối mạng, mô-đun chức năng cấu hình tham số, mô-đun chức năng máy trạng thái, mô-đun chức năng tiền xử lý dữ liệu, mô-đun chức năng lập kế hoạch quỹ đạo, mô-đun chức năng tính toán động học , mô-đun chức năng giao tiếp bus, mô-đun chức năng I/O kỹ thuật số, mô-đun chức năng phản hồi trạng thái, mô-đun chức năng cảnh báo lỗi và mô-đun chức năng bảo mật.
Phần mềm điều khiển cung cấp giao diện phát triển thứ cấp và mở giao diện và giao thức liên lạc cho Bên A. Nền tảng sáu bậc tự do chạy trơn tru, trơn tru và không vấp ngã. Các thuật toán động học thuận và nghịch phản hồi trạng thái của nền tảng hoặc dữ liệu vị trí của xi lanh điện trong thời gian thực. Thuật toán có chức năng bảo vệ an ninh nội bộ cho nền tảng, sẽ không gây thiệt hại cho nền tảng nếu người dùng nhập nhầm dữ liệu!